Introduction
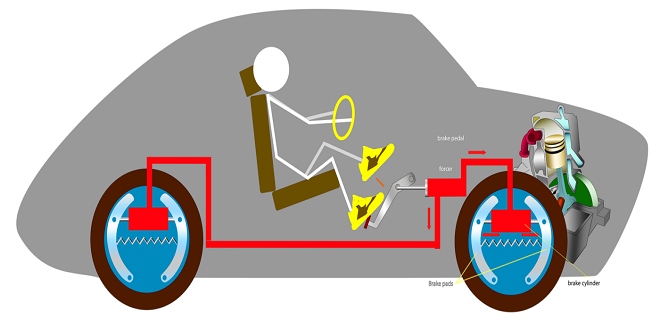
The reason for the development of anti-lock brakes (ABS) is very simple. Under braking conditions, if one or more of the vehicle wheels locks (begins to skid), there are a number of consequences
The obvious result is that an accident is far more likely to occur. The maximum deceleration of a vehicle is achieved when maximum energy conversion is taking place in the brake system. This is the conversion of kinetic energy to heat energy at the discs and brake drums. The potential for this conversion process between a tires skidding, even on a dry road, is far less. A good driver can pump the brakes on and off to prevent locking but electronic control can achieve even better results
ABS is becoming more common on lower price vehicles, which should be a significant contribution to safety. It is important to remember, however, that for normal use, the system is not intended to allow faster driving and shorter braking distances. It should be viewed as operating in an emergency only. Figure 15.1 shows how ABS can help to maintain steering control even under very heavy braking conditions.
Requirements of ABS
A good way of considering the operation of a complicated system is to ask: ‘what must the system be able to do In other words, what are the requirements These can be considered for ABS under the following headings.
Fail-safe system
Fail-safe system In the event of the ABS system failing the conventional brakes must still operate to their full potential. In addition, a warning must be given to
Maneuverability must be maintained
Good steering and road holding must continue when the ABS system is operating. This is arguably the key issue, as being able to swerve around a hazard whilst still braking hard is often the best course of action.
The immediate response must be available
Even over a short distance, the system must react such as to make use of the best grip on the road. The response must be appropriate whether the driver applies the brakes gently or slams them on hard.
Operational influences
Normal driving and maneuvering should produce no reaction on the brake pedal. The stability and steering must be retained under all road conditions. The system must also adapt to braking hysteresis when the brakes are applied, released, and then re-applied.
Even if the wheels on one side are on dry tarmac and the other side on the ice, the yaw (rotation about the vertical axis of the vehicle) of the vehicle must be kept to a minimum and only increase slowly in order to allow the driver to compensate.
Controlled wheels In its basic form, at least one wheel on each side of the vehicle should be controlled on a separate circuit. It is now general for all four wheels to be separately controlled on passenger vehicles.
Last word
The system must operate under all speed conditions down to walking pace. At this very slow speed even when the wheels lock the vehicle will come to rest very quickly. If the wheels did not lock then, in theory, the vehicle would never stop.