Introduction
Active suspension, like many other innovations, was developed in the Grand Prix world. It is now slowly becoming more popular on production vehicles. It is interesting to note that just as some Formula 1 team perfected it, the rules changed (1993–94) to prevent its use
Conventional suspension systems are always a compromise between soft springs for comfort and harder springing for better cornering ability. A suspension system has to fulfill four main
similarities. If the rate of change of steering position is beyond a threshold the system will switch to a harder suspension setting.
Vehicle speed
The speed of the vehicle is taken from a standard type sensor as used for operating the spew
Throttle position
Similar to the existing throttle potentiometers. This gives data on the driver’s intention to accelerate or decelerate allowing the suspension to switch to a harder setting when appropriate
Driver mode selection
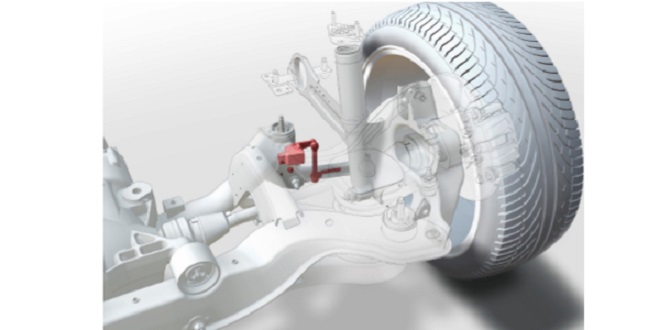
A switch is provided allowing the driver to choose soft or hard settings. Even if the soft setting is selected, the system will switch to hard, under certain operational conditions. The layout of the suspension system also shows a simplified view of the hydraulic unit. This is, in effect, a hydraulic ram and can have oil under very high pressure fed to the upper or lower chamber.
The actual operation of the whole system is as follows. As a wheel meets a bump in the road there is increased upward acceleration and vertical load. This information is fed to the ECU, which calculates the ideal wheel displacement. A control signal is now sent to the servo valve(s), which controls the position of the main hydraulic units. As this process can occur hundreds of times per second, the wheel can follow the contour of the road surface. This cushions the vehicle body from unwanted forces.
By considering information from other sensors, such as the lateral acceleration sensor, which gives data relating to cornering, and the longitudinal sensor, which gives data relating to braking or acceleration forwards, the actuators can be moved to provide maximum stability at all times. Active suspension looks set to have an easy ride in the future. The benefits are considerable and, as component prices reduce, the system will become available on more vehicles. It is expected that even off-road vehicles may be fitted with active suspension in the near future
Traction control
Acceleration can be determined from a pendulum-type sensor using strain gauges linked to a mass, or devices similar to an engine knock sensor.
Yaw transducer
Yaw can be determined from lateral acceleration if the sensor is mounted at the front or rear of the vehicle.
Control of tractive force can be by a number of methods. shows a comparison of three techniques used to prevent wheel spin, throttle, ignition and brake control.
Throttle control
This can be via an actuator, which can move the throttle cable, or if the vehicle employs a drive-by-wire accelerator, then control will be in conjunction with the engine management ECU. This throttle control will be independent of the driver’s throttle pedal position. This method alone is relatively slow to control engine torque.
Last word
When wheel spin is detected the throttle position and ignition timing are adjusted but the best results are gained when the brakes are applied to the spinning wheel. This not only prevents the wheel from spinning but acts to provide a limited-slip differential action. This is particularly good when on a road with varying braking force coefficients.